


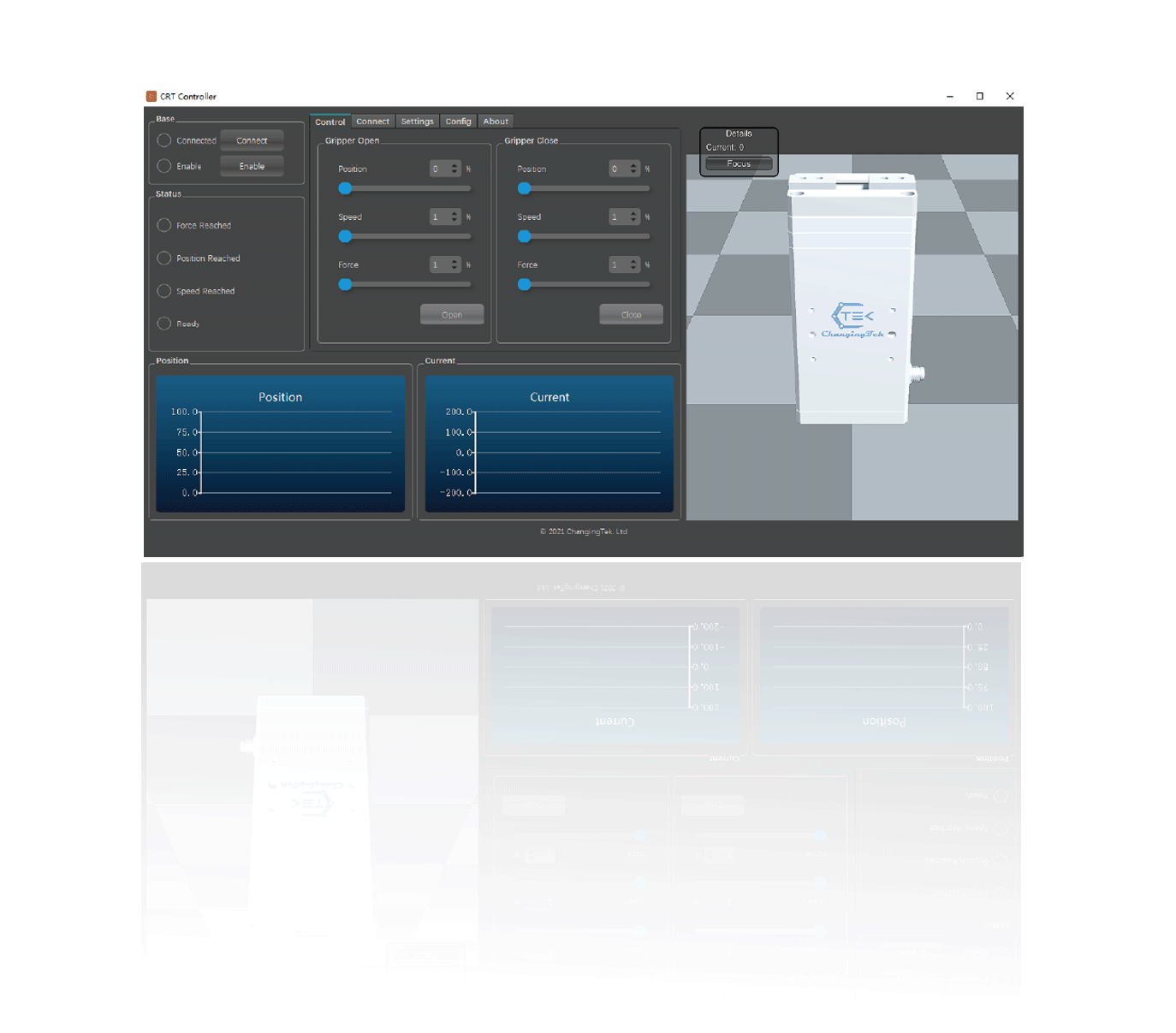
平行手控制功能
完善伺服步进上位机侧软件功能
统一的通讯协议

平行手控制软件

通讯协议
-

框架搭建
软件视图框架
控制逻辑框架
新版知行通讯协议解析 
功能全面
软件编写 软件功能
效能测试 参数设置
运动反馈参数监控 报警监控
技术参数
◆ 本项目以14平行手控制功能为基础,完善伺服步进上位机侧软件功能,同时为后续新的知行手产品建立一套统一的通讯协议
◆ 搭建软件视图框架与控制逻辑框架,编写新版知行通讯协议解析模块
◆ 完成软件编写,完成软件功能、效能测试,实现知行手的参数设置、运动反馈参数监控、报警监控等功能
◆ 已完成软件1.0版本归档,发布使用
◆ 已申请软著《基于Qt的知行手集成控制平台》
◆ 搭建软件视图框架与控制逻辑框架,编写新版知行通讯协议解析模块
◆ 完成软件编写,完成软件功能、效能测试,实现知行手的参数设置、运动反馈参数监控、报警监控等功能
◆ 已完成软件1.0版本归档,发布使用
◆ 已申请软著《基于Qt的知行手集成控制平台》
规格参数
适用范围





Copyright © 知行机器人科技(苏州)有限公司.All Rights Reserved 技术支持:苏州网站开发 备案号:苏ICP备20037665号-2

